Code-Level Verification for Autonomous Systems
Mar 24, 2023· ·
0 min read
·
0 min read
Yangge Li
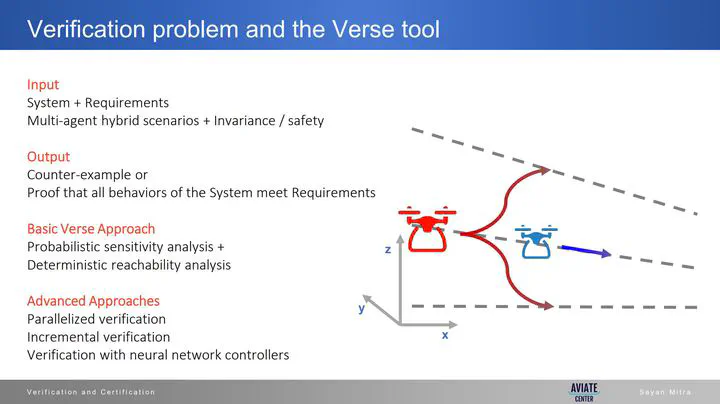 Image credit:
Image credit:Abstract
We present the Verse library with the aim of making hybrid system verification more usable for multi-agent scenarios. In Verse, decision making agents move in a map and interact with each other through sensors. The decision logic for each agent is written in a subset of Python and the continuous dynamics is given by a black-box simulator. Multiple agents can be instantiated, and they can be ported to different maps for creating scenarios. Verse provides functions for simulating and verifying such scenarios using existing reachability analysis algorithms. We illustrate capabilities and use cases of the library with heterogeneous agents, incremental verification, different sensor models, and plug-n-play subroutines for post computations.
Date
Mar 24, 2023 1:00 PM — 3:00 PM
Event
Location
Virtual