Verse: A python library for reasoning about multi-agent hybrid system scenarios
Jul 17, 2023·,,,,·
0 min read
Yangge Li
Haoqing Zhu
Katherine Braught
Keyi Shen
Sayan Mitra
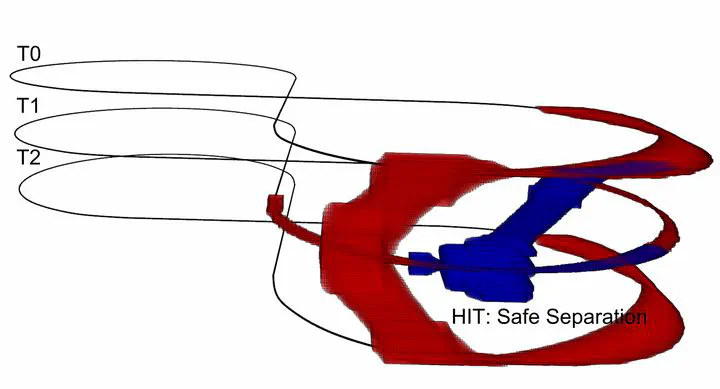 Reachable set for two drone scenario computed by Verse
Reachable set for two drone scenario computed by VerseAbstract
We present the Verse library with the aim of making hybrid system verification more usable for multi-agent scenarios. In Verse, decision making agents move in a map and interact with each other through sensors. The decision logic for each agent is written in a subset of Python and the continuous dynamics is given by a black-box simulator. Multiple agents can be instantiated, and they can be ported to different maps for creating scenarios. Verse provides functions for simulating and verifying such scenarios using existing reachability analysis algorithms. We illustrate capabilities and use cases of the library with heterogeneous agents, incremental verification, different sensor models, and plug-n-play subroutines for post computations.
Type
Publication
International Conference on Computer Aided Verification